CHUNGUS
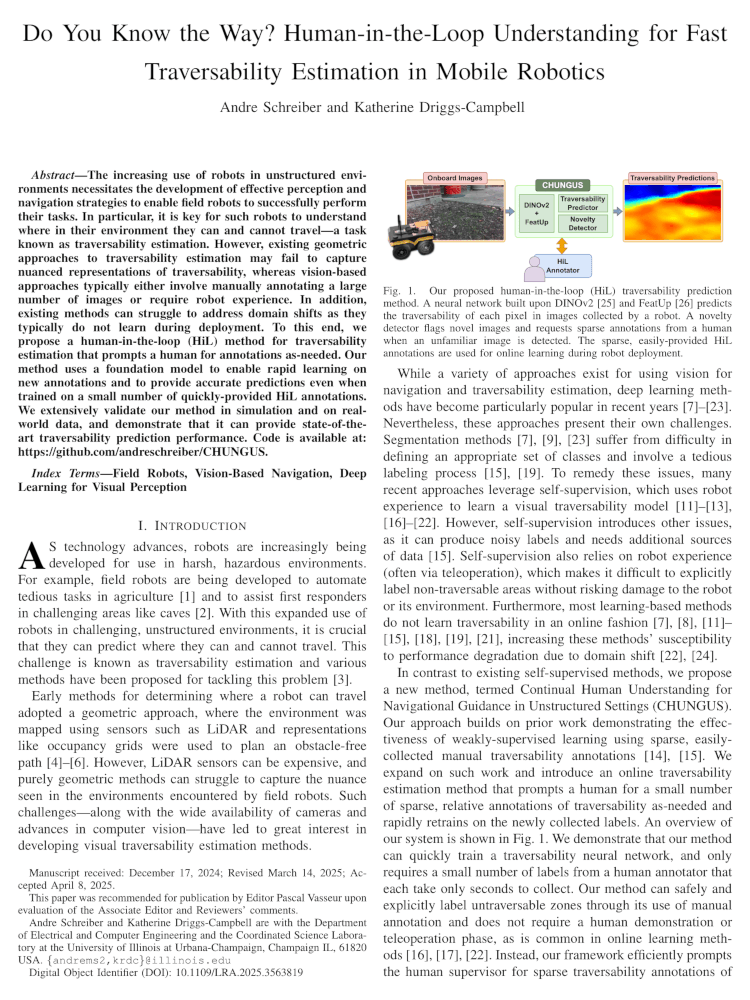
We introduce a HiL traversability prediction method that can rapidly learn during robot deployment by querying a human for sparse, quickly-provided annotations as-needed
W-RIZZ
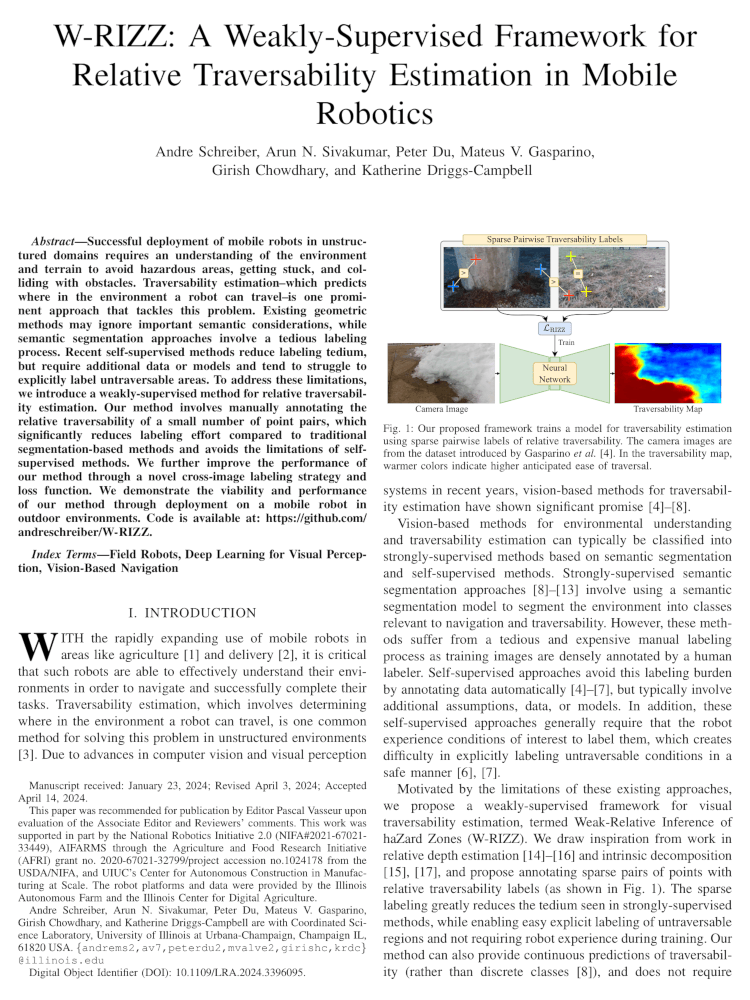
We introduce a weakly-supervised method for relative traversability estimation to overcome the limitations of existing self-supervised and strongly-supervised methods
ROAR
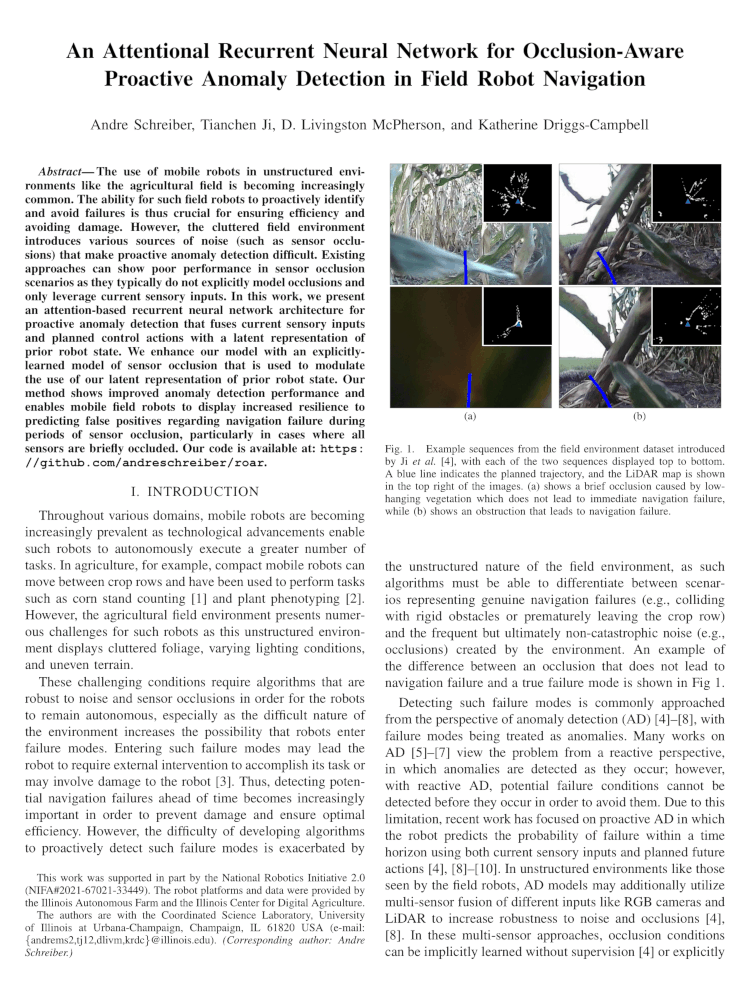
We introduce a novel occlusion-aware recurrent neural network architecture for field robot navigation that can provide accurate predictions even during sensor occlusion